KCE RX2C 遥控玩具专用单芯片解决集成控制器
KCE RX2C 是为遥控汽车等玩具设计的专用单芯片解决方案,将传统的接收芯片+片外功率驱动的方案替代为接收+驱动单芯片方案,降低器件外围成本,提高可靠性。KCE RX2C 适用于2~4 节电池的应用,该芯片具有较大的电流驱动能力。内置箝位二极管可释放感性负载的反向冲击电流,可安全可靠用于电机驱动中;过温保护功能进一步增强了系统的可靠性。
特点
与TX-2S 搭配实现精简的遥控汽车解决方案
宽工作电压范围(VDD=2V~7V ,推荐应用在2~4 节电池应用中);
内置2 路全桥驱动(动力电机,转向电机),前后、转向每路驱动能力都可达2.5A
以上,持续工作电流2A(考虑散热);
完全的可操控性(前进、后退、左转、右转);
带有过温保护;
低导通电阻的功率管(典型情况下NMOS 和PMOS 有源区电阻之和为0.4 欧姆)
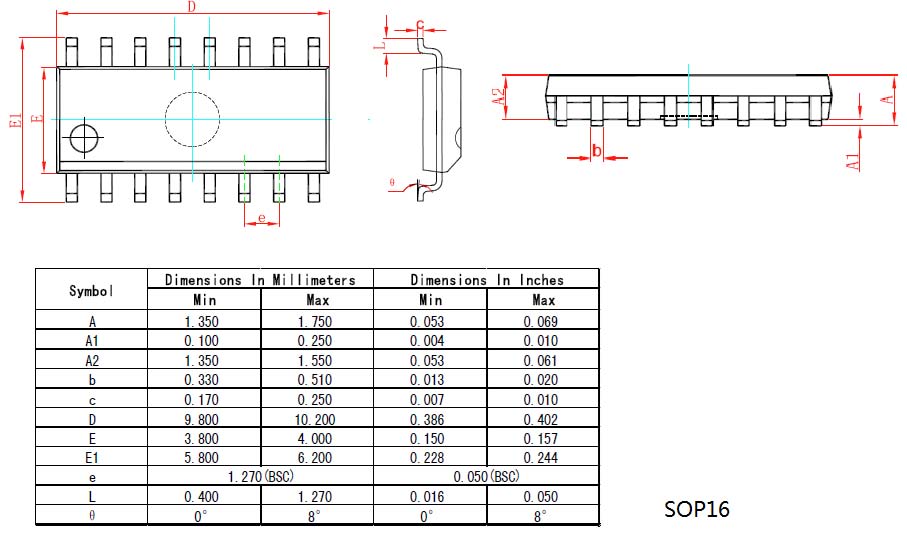
采用SOP16 封装形式;
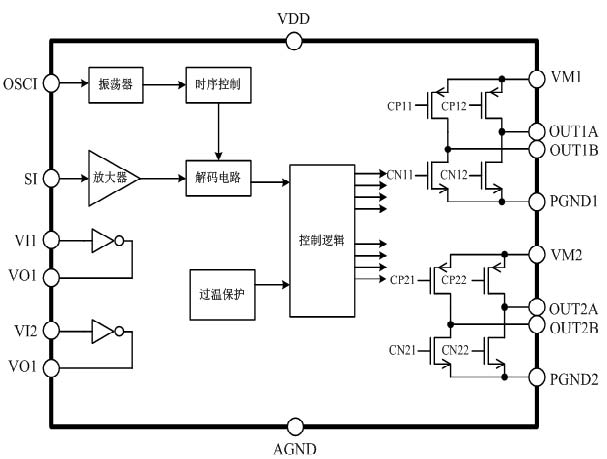
功能框图
图1. 功能框图
管脚定义
表1. 遥控+马达驱动的管脚定义
1
VO2
用于信号放大的反相器2 输出端
2
SI
编码信号输入端
3
OSCI
振荡器电阻输入端
4
AGND
控制部分电源地
5
VM2
左转右转马达2 的输入电源
6
右转OUT2A
左转右转马达2 输出B 端
7
左转OUT2B
左转右转马达2 输出A 端
8
GND2
左转右转马达2 的地
9
GND1
前进后退马达1 的地
10
后退OUT1B
前进后退马达1 输出B 端
11
前进OUT1A
前进后退马达1 输出A 端
12
VM1
前进后退马达1 的输入电源
13
VDD
控制部分电源正端
14
VI1
用于信号放大的反相器1 输入端
15
VO1
用于信号放大的反相器1 输出端
16
VI2
用于信号放大的反相器2 输入端
功能描述
过温保护
当结温高于150°C 时进入待机状态,不接受指令,直到温度降低到130°C ,恢复正常工作,指令到达后动作。 解码频率
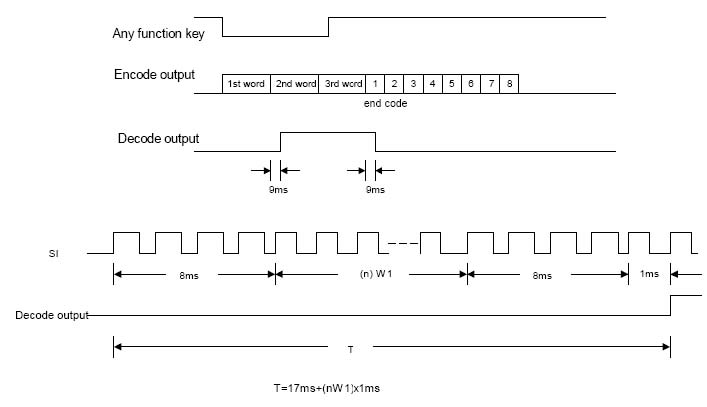
采用经典的RC 驰裕型振荡器,在做好温度补偿基础上,采用Trimming 电阻方式达到指标。时序说明(参考TX-2B 与RX-2B):
图2. 编码时序(位编码格式)

图3. 编码时序(字编码格式)
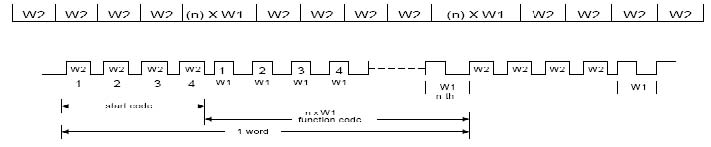
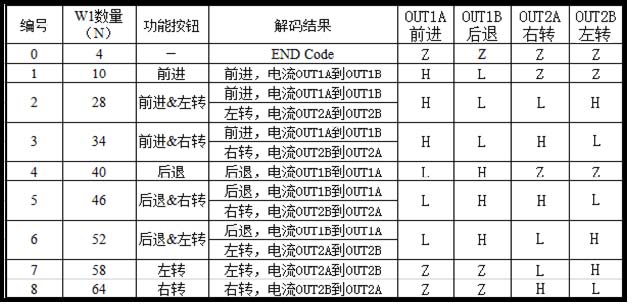
图4. 解码时序
应用范例
KCE RX2C 应用电路图图5. RF 遥控+电机驱动(电动车或者遥控玩具)
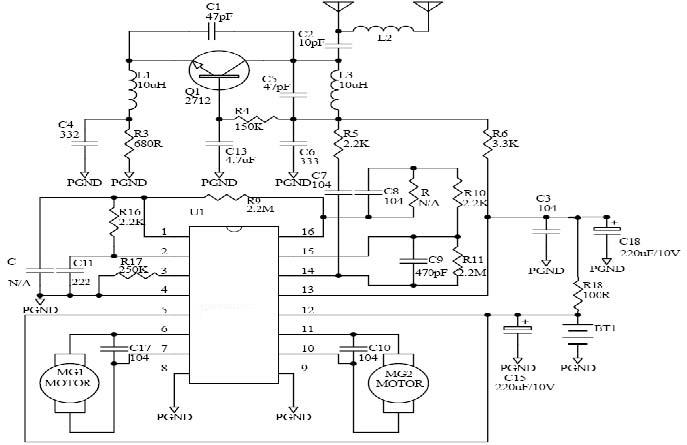
元器件选取及布局建议:
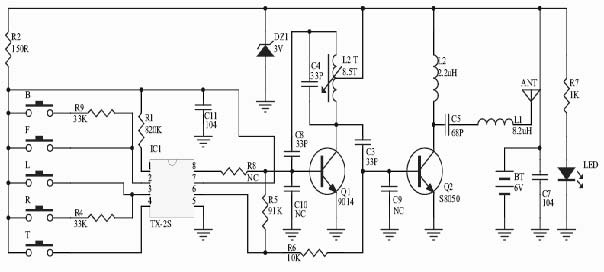
图6. 红外遥控+驱动(电动车或者遥控玩具)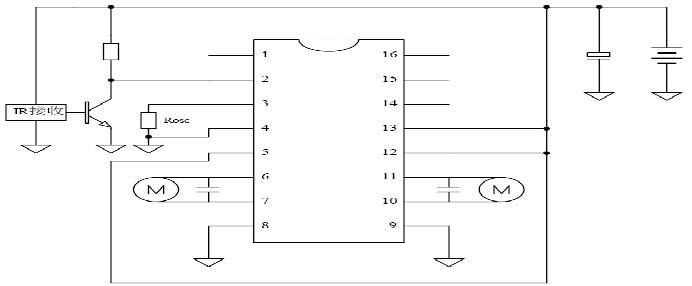 TX-2S 应用电路图
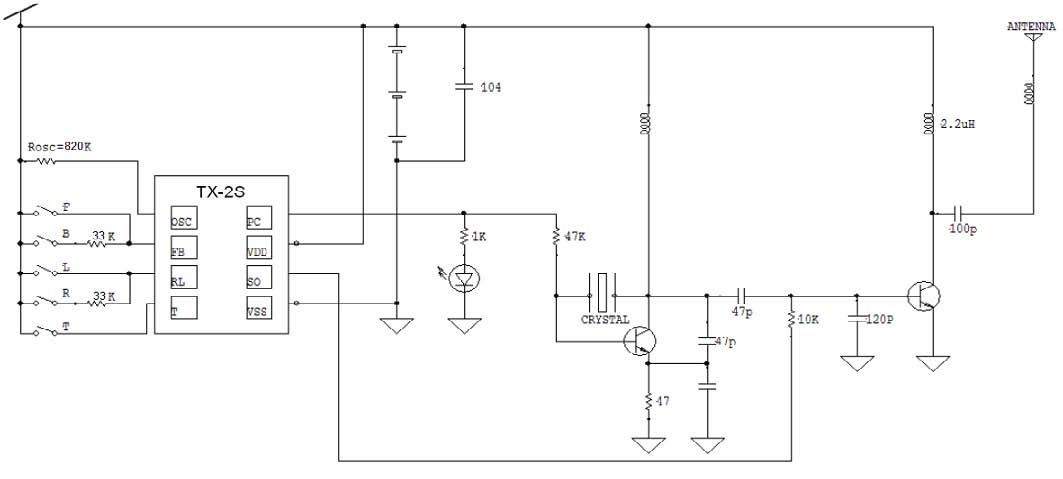
TX-2S 应用电路图
TX-2S 是为配合RX-2B/RX2C 工作而设计的。TX-2S 提供了5 功能编码和控制RF 遥控车功能的低成本SOP8 封装单芯片解决方案。
图7. RF 遥控发射(电动车或者遥控玩具)
极限参数
表2. 绝对最大额定值(TA=25°C)
| 参数 | 符号 | 值 | 单位 |
|---|---|---|---|
| 最大控制电源电压 | VDD(MAX) | 8 | V |
| 输入输出电压 | VIN/VOUT | GND-0.3~VDD+0.3 | V |
| 最大外加输出电压 | VOUT(MAX) | VDD | V |
| 每通道最大输出电流(峰值) | IOUT(MAX) | 3.5 | A |
| ESD 能力(人体模型) | 2500 | V |
电气特性
表3. 电特性参数表(测试条件VDD=4.0V,TA=25°C)
| 参数 | 符号 | 最小 | 典型 | 最大 | 单位 |
| 电源电压 | VDD | 2.0 | - | 7.0 | V |
| 静态电流 | IQ | - | 1.4 | - | mA |
| OUT1 功率管NMOS+PMOS 导通电阻(ACTIVE) | RON1 | - | 0.4 | - | Ohm |
| OUT2 功率管NMOS+PMOS 导通电阻(ACTIVE) | RON2 | 0.4 | Ohm | ||
| 过温保护温度 | TP | - | 150 | - | ℃ |
| 过温保护滞回温度 | - | 20 | - | ℃ | |
| 解码频率(REXT=250k) | FOSC | 118 | 128 | 138 | kHz |
| 振荡器温度系数 | COSC | 300 | ppm | ||
| 逻辑高电平 | VINH | 2.0 | - | - | V |
| 逻辑低电平 | VINL | - | - | 0.8 | V |
封装数据